
Efforts are underway to realize Level 4 autonomous driving. As navigating intersections on public roads is a major challenge, the development of a Vehicle-Infrastructure Integration (VII) through road infrastructure development has been considered, and demonstration experiment have been carried out in various locations. From next fiscal year, the launch of technical standards and guidelines will finally begin, and the system will enter the widespread adoption phase. We talked to Naoki FUNAOKA from the Transportation Planning Dept., Social Innovation Div., Akira MITSUYASU from the Mobility DX Sec., DX Business Promotion Dept., Digital Service Div., Ryotaro TOMINAGA from the Transportation Strategy Sec., Social Innovation Div. of Chubu, and Daichi NAKAYAMA from the Transportation Policy Sec., Social Innovation Div. of Hokkaido, PACIFIC CONSULTANTS, who have all conducted numerous demonstration experiments tailored to local traffic conditions, about the current state and challenges of road-vehicle collaborative systems.
INDEX
- What is a Vehicle-Infrastructure Integration (VII) system?
- Mechanism of Vehicle-Infrastructure Integration (VII) system
- Issues with Vehicle-Infrastructure Integration (VII)
- Latest trends in Vehicle-Infrastructure Integration (VII) System's demonstration experiment
- What PACIFIC CONSULTANTS can do
What is a Vehicle-Infrastructure Integration (VII) system?
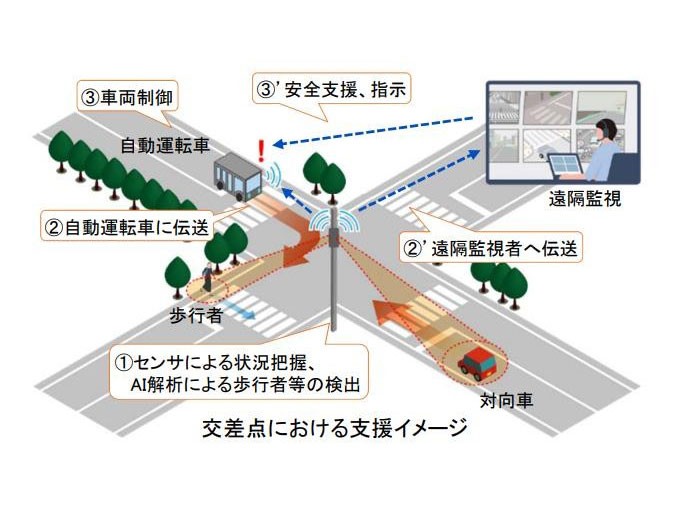
A Vehicle-Infrastructure Integration (VII) system is a system that uses roadside sensors installed on road infrastructure to detect road conditions that are difficult for autonomous vehicles to detect using their own onboard sensors. It then provides this information to autonomous vehicles to support safe operation. Conventional autonomous vehicles rely on onboard sensors to collect information about their surroundings and control their driving based on this information. However, at intersections on public roads, there are blind spots for onboard sensors due to buildings or oncoming vehicles waiting to turn right, and roads with fast-moving oncoming vehicles. This means that onboard sensors alone are slow to detect approaching traffic, making it difficult for the vehicle to ensure safety. Furthermore, intersections, where vehicles turning right and left, bicycles on the road, and pedestrians crossing the road, intertwine in complex ways, are frequent locations for traffic accidents. Statistics show that intersections account for 58.2% of all traffic accidents (Data in 2024 collected by the General Insurance Association of Japan).
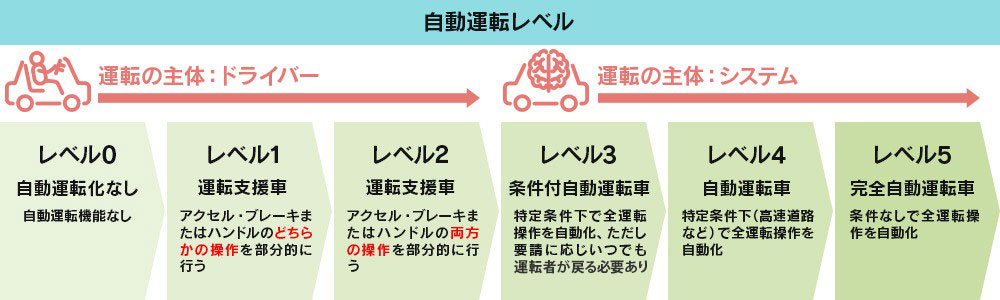
Currently, autonomous driving on public roads is based on Level 2, where the driver intervenes as needed. However, in order to commercialize Level 4 autonomous driving and fully popularize autonomous driving, a major issue is how to make it safe to pass through intersections, where complex situations can arise.
Mechanism of Vehicle-Infrastructure Integration (VII) system
A Vehicle-Infrastructure Integration (VII) system uses roadside sensors to detect and process obstacles, and transmits the information wirelessly to the autonomous vehicle either directly or via a remote monitoring room. The devices used as the roadside sensors that are the core of the system include visible light cameras, far-infrared (FIR) cameras, and Light Detection and Ranging (LiDAR). LiDAR is a device that measures the distance and position of an object by emitting laser light and measuring the time it takes for the light to hit the object and bounce back.
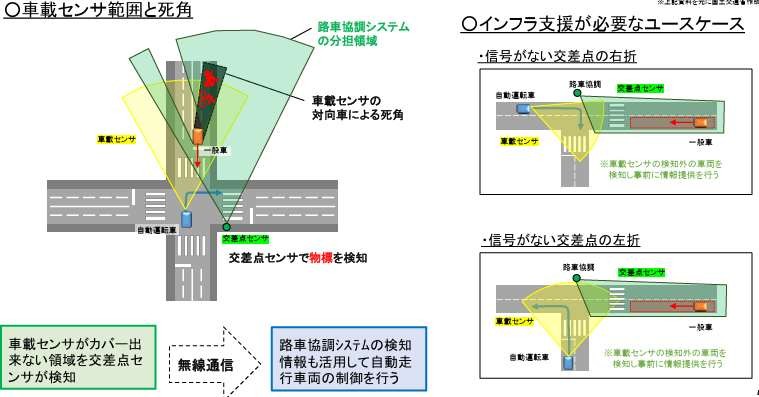
As shown in the diagram, when an autonomous vehicle attempts to turn right at an intersection where a Vehicle-Infrastructure Integration (VII) system has been installed, the intersection sensor (roadside sensor) detects the area behind the general vehicle, which is in the blind spot of the onboard sensor, and instantly determines how many seconds it will take to pass the intersection and transmits this information to the autonomous vehicle. The autonomous vehicle then combines this information with information obtained from the onboard sensor to determine when to turn right and then execute the turn.
Issues with Vehicle-Infrastructure Integration (VII)
The demonstration experiments of Vehicle-Infrastructure Integration (VII) systems are currently underway, but the most important factors in whether they will function effectively are the position and accuracy of the sensors, as well as the completeness of the programs that can quickly and accurately interpret the information sent. For example, in areas with heavy snowfall, LiDAR can mistakenly detect falling snow as an obstacle, or a motorcycle traveling parallel to a car captured by a camera can be mistakenly recognized as a single vehicle, making it impossible to predict the subsequent movements of the motorcycle. Furthermore, changing the algorithm to resolve this issue so that the motorcycle and the car traveling parallel can be recognized separately ended up making other video analysis more difficult.
What has become clear in studies of Vehicle-Infrastructure Integration (VII) system is that attention tends to be focused solely on the performance of the sensor as a device. What are the characteristics of the intersection and what information needs to be acquired? Intersections have their own unique challenges, and these determine where the sensor needs to look and what it needs to capture. Selecting a sensor is not simply a matter of selecting the device's performance and specifications or determining its field of view. Considering the weather unique to the area and the characteristics of the environment and traffic, such as the number of large trucks, motorcycles, bicycles, or pedestrians, will determine the optimal type and combination of sensors, installation location, and tuning method for acquiring information from that intersection.
Latest trends in Vehicle-Infrastructure Integration (VII) system's demonstration experiment
Ministry of Land, Infrastructure, Transport and Tourism has been conducting demonstration experiments since fiscal 2022 with the aim of popularizing Level 4 autonomous driving. The target is local governments that already operate autonomous buses and other vehicles. In order to upgrade current autonomous driving to Level 4 autonomous driving, a Vehicle-Infrastructure Integration (VII) system will be built at specific intersections and operated for a certain period of time to obtain various information. In FY2024, the experiment was carried out in 22 local governments nationwide, and in FY2025 in 13 local governments. In order to obtain more and more diverse data, a variety of autonomous vehicles and sensors are used, and much data is being collected on anticipated use cases.
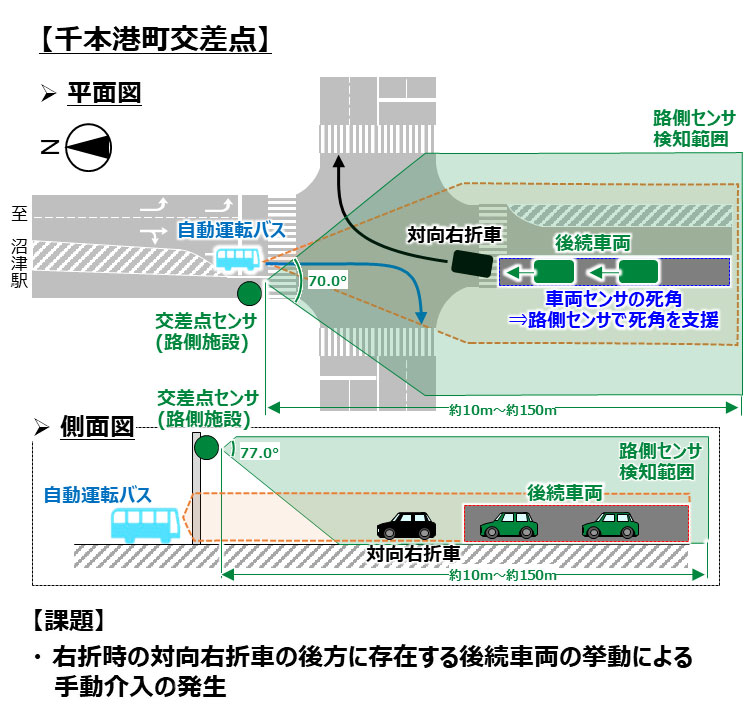
PACIFIC CONSULTANTS has also been involved in many demonstration experiments across the country, accumulating a wide range of technical information in preparation for the establishment of technical standards and guidelines for the future development of road-vehicle cooperative systems. For example, in 2024, we conducted demonstration experiment at Senbonminatocho intersection in Numazu City.
<Numazu City>
Numazu City has been considering introducing autonomous buses to strengthen the network connecting Numazu Station and Numazu Port, and began conducting demonstration experiment in FY2019. In FY2023, a demonstration experiment of a Vehicle-Infrastructure Integration (VII) system was launched at the Senbonminatocho intersection, a right-turn point on the bus route. Building on the results of the previous fiscal year, further demonstration experiments were conducted at the same intersection in FY2024. At the Senbonminatocho intersection, a Vehicle-Infrastructure Integration (VII) system was constructed and tested, using the use case of detecting a following vehicle hidden behind an oncoming right-turning vehicle (large vehicle) when a bus turns right. A LiDAR (roadside sensor) was installed on an existing traffic light pole at the intersection, and the experimental results were evaluated for effectiveness in terms of detection accuracy (accuracy of detected information), freshness (real-time information generation and transmission), reliability (stability of transmitted information), and safety (occurrence of manual intervention when the Vehicle-Infrastructure Integration (VII) system was implemented). The evaluation results demonstrated the effectiveness of the LiDAR's high detection accuracy and rapid processing performance, as well as the improved safety achieved by the introduction of the Vehicle-Infrastructure Integration (VII) system.
<Kamishihoro Town, Hokkaido>
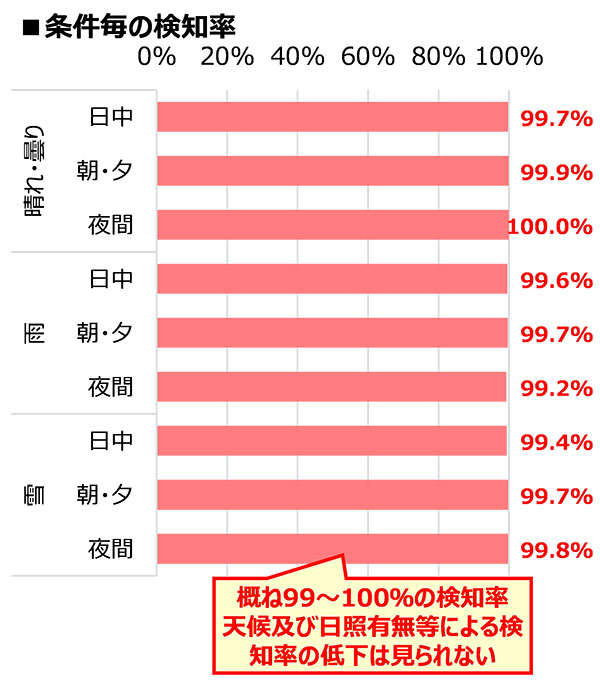
Kamishihoro Town, the only town in Hokkaido that regularly operates autonomous buses, has been conducting demonstration experiments since FY2023 to verify the effectiveness of sensors in snowy, cold regions. While demonstration experiment typically collect data over a one-month period, the one conducted in FY2024 lasted six months. This was the first long-term demonstration experiment in Japan spanning seasons, where weather and sunlight conditions vary greatly. For example, the town was able to obtain highly useful data, with the sensor's detection accuracy generally reaching a detection rate of 99-100% throughout the year. However, data acquisition during heavy snowfall and at night (especially during rainy weather) is necessary for future implementation in cold regions. While not related to weather, long-term operation has also been subject to brief power outages, highlighting issues related to backup and maintenance.
What PACIFIC CONSULTANTS can do
The realization of Level 4 autonomous driving will significantly reduce traffic accidents caused by human drivers. It will also ensure safe transportation for the elderly, ease traffic congestion, contribute to improvements in bus and logistics services that are suffering from driver shortages, and even provide a means of transportation that allows people to return home safely even during times of reduced visibility such as whiteouts. Therefore, early practical application of this technology is highly anticipated.
To achieve this, key considerations are which intersections along the route to install the road-vehicle cooperative system at and how to design it. Points with poor visibility and heavy traffic are particularly challenging for autonomous vehicles. Furthermore, further implementation testing is necessary, focusing on areas with specific challenges, such as a high number of large trucks or bicycles. Furthermore, rather than relying solely on sensors, it is also necessary to improve the driving space by providing dedicated right-turn lanes, eliminating on-street parking, ensuring bicycle lanes, and transplanting or cutting down roadside trees that obstruct visibility. Road-vehicle cooperative systems do not simply collect and utilize information from sensors; they require a comprehensive view of the entire road infrastructure and a design that utilizes digital tools most effectively. To achieve this, a comprehensive approach, including road infrastructure, is essential. Autonomous driving is often thought of as being solely about vehicle performance. However, this alone does not guarantee safe operation. Comprehensive development of road infrastructure, including Vehicle-Infrastructure Integration (VII) system and driving space, is essential.
Our company has Transportation Planning Dept. that deals with public transportation and urban development, a DX Business Promotion Dept. that deals with digital businesses such as autonomous driving, and Road & Highway Dept. that deals with road infrastructure development and design, and engineers from all over the country are integrating their knowledge to tackle social issues. We will continue our efforts toward the practical application of Level 4 autonomous driving.






